Review (Figure 1) Is the Position-versus-time Graph of a Particle in Simple Harmonic Motion
What is Elementary Harmonic Move?
Simple Harmonic Motion or SHM is defined equally a movement in which the restoring force is directly proportional to the displacement of the torso from its mean position. The direction of this restoring strength is always towards the mean position. The acceleration of a particle executing unproblematic harmonic motion is given by, a(t) = -ω2ten(t). Here, ω is the angular velocity of the particle.
Table of Contents
- Deviation Between Simple Harmonic, Periodic and Oscillation Motion
- Types of Simple Harmonic Motion
- General Terms
- Differential Equation
- Angular SHM
- Quantitative Analysis
- Necessary conditions
- Energy in SHM
- Geometrical Interpretations
- Horizontal Phasor
Simple Harmonic, Periodic and Oscillation Movement
Uncomplicated harmonic motion can be described every bit an oscillatory motion in which the acceleration of the particle at any position is directly proportional to the displacement from the hateful position. It is a special instance of oscillatory motion.
All the Uncomplicated Harmonic Motions are oscillatory and besides periodic but not all oscillatory motions are SHM. Oscillatory motion is also called the harmonic motion of all the oscillatory motions wherein the most important ane is simple harmonic motion (SHM).
In this type of oscillatory movement displacement, velocity and acceleration and force vary (westward.r.t time) in a way that tin be described by either sine (or) the cosine functions collectively called sinusoids.
Likewise Read:
- Unproblematic Pendulum Concepts
- Jump-Mass System
The study of Simple Harmonic Motility is very useful and forms an of import tool in understanding the characteristics of sound waves, light waves and alternating currents. Whatever oscillatory motion which is not simple Harmonic tin can exist expressed as a superposition of several harmonic motions of different frequencies.
Difference betwixt Periodic, Oscillation and Uncomplicated Harmonic Motion
Periodic Movement
- A move repeats itself after an equal interval of time. For case, uniform circular motion.
- In that location is no equilibrium position.
- There is no restoring force.
- There is no stable equilibrium position.
Oscillation Motility
- To and fro motility of a particle about a mean position is called an oscillatory motion in which a particle moves on either side of equilibrium (or) mean position is an oscillatory motion.
- It is a kind of periodic motility bounded between ii extreme points. For example, Oscillation of Simple Pendulum, Spring-Mass System.
- The object will continue on moving betwixt two extreme points near a fixed signal is called mean position (or) equilibrium position along any path. (the path is non a constraint).
- There will be a restoring strength directed towards equilibrium position (or) mean position.
- In an oscillatory motion, the net strength on the particle is nothing at the mean position.
- The mean position is a stable equilibrium position.
Elementary Harmonic Motion or SHM
- It is a special case of oscillation along with directly line between the two farthermost points (the path of SHM is a constraint).
- Path of the object needs to be a straight line.
- At that place volition be a restoring force directed towards equilibrium position (or) mean position.
- Mean position in Simple harmonic movement is a stable equilibrium.
Atmospheric condition for SHM:
\(\begin{assortment}{l}\begin{matrix} \overrightarrow{F}\propto -\overrightarrow{x} \\ \overrightarrow{a}\,\,\propto -\overrightarrow{x} \\ \stop{matrix}\end{array} \)
Types of Simple Harmonic Motion
SHM or Simple Harmonic Motion can be classified into two types:
- Linear SHM
- Athwart SHM
Linear Simple Harmonic Motion
When a particle moves to and fro about a stock-still point (called equilibrium position) along with a directly line and then its motion is called linear Uncomplicated Harmonic Motion.
For Instance: spring-mass organization
Conditions for Linear SHM:
The restoring force or acceleration interim on the particle should always be proportional to the displacement of the particle and directed towards the equilibrium position.
\(\brainstorm{assortment}{fifty}\begin{matrix} \overrightarrow{F}\propto -\overrightarrow{x} \\ \overrightarrow{a}\,\,\propto -\overrightarrow{10} \\ \end{matrix}\end{array} \)
-
\(\begin{array}{50}\overrightarrow{x}\end{array} \)
– deportation of particle from equilibrium position. -
\(\begin{assortment}{l}\overrightarrow{F}\end{assortment} \)
– Restoring force -
\(\brainstorm{array}{fifty}\overrightarrow{a}\,\end{array} \)
- acceleration
Athwart Simple Harmonic Move
When a system oscillates angular long with respect to a fixed axis so its motion is chosen angular elementary harmonic motion.
Weather condition to Execute Angular SHM:
The restoring torque (or) Athwart acceleration interim on the particle should always be proportional to the angular displacement of the particle and directed towards the equilibrium position.
Τ ∝ θ or α ∝ θ
Where,
- Τ – Torque
- α angular dispatch
- θ – angular displacement
Simple Harmonic Movement Key Terms
Mean Position
The signal at which internet strength interim on the particle is nothing.
From the mean position, the forcefulness interim on the particle is,
\(\begin{array}{fifty}\overrightarrow{F}\propto -\overrightarrow{x}\finish{array} \)
\(\begin{array}{l}\overrightarrow{a}\,\propto -\overrightarrow{x}\end{array} \)
Weather condition at Mean Position
\(\begin{array}{50}\overrightarrow{{{F}_{cyberspace}}}=0\end{array} \)
.\(\brainstorm{array}{fifty}\overrightarrow{a}=0\end{array} \)
The force acting on the particle is negative of the deportation. So, this point of equilibrium will exist a stable equilibrium.
Amplitude in SHM
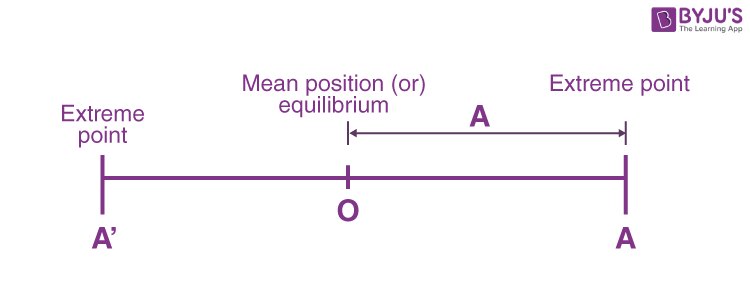
It is the maximum displacement of the particle from the mean position.
Time Period and Frequency of SHM
The minimum time after which the particle keeps on repeating its movement is known as the time period (or) the shortest time taken to complete one oscillation is as well defined equally the time period.
T = 2π/ω
Frequency:The number of oscillations per 2nd is defined as the frequency.
Frequency = i/T and, athwart frequency ω = 2πf = 2π/T
Stage in SHM
The phase of a vibrating particle at any instant is the country of the vibrating (or) oscillating particle regarding its deportation and direction of vibration at that particular instant.
The expression, position of a particle as a function of fourth dimension.
x = A sin (ωt + Φ)
Where (ωt + Φ) is the stage of the particle, the phase bending at time t = 0 is known as the initial phase.
Phase Difference
The deviation of total phase angles of two particles executing simple harmonic motion with respect to the mean position is known as the stage difference. Ii vibrating particles are said to be in the same phase, the phase difference between them is an fifty-fifty multiple of π.
ΔΦ = nπ where n = 0, 1, 2, 3, . . . . .
Two vibrating particles are said to be in opposite phase if the stage difference between them is an odd multiple of π.
ΔΦ = (2n + 1) π where n = 0, i, two, three, . . . . .
Simple Harmonic Motion Equation and its Solution
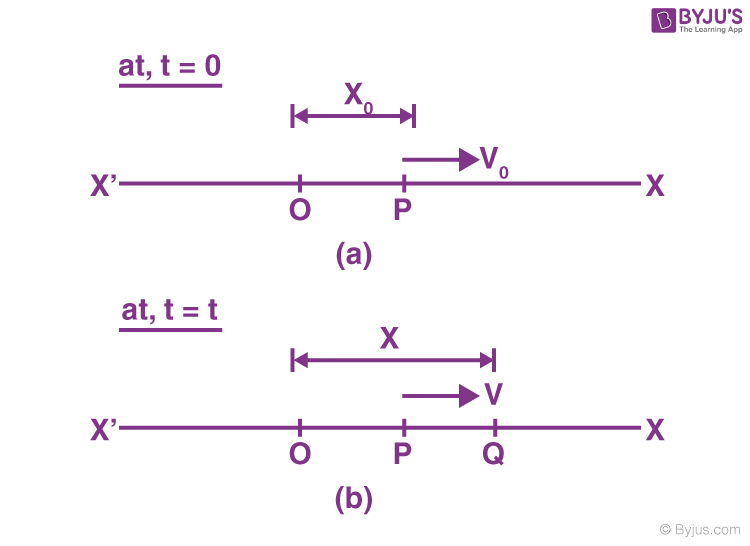
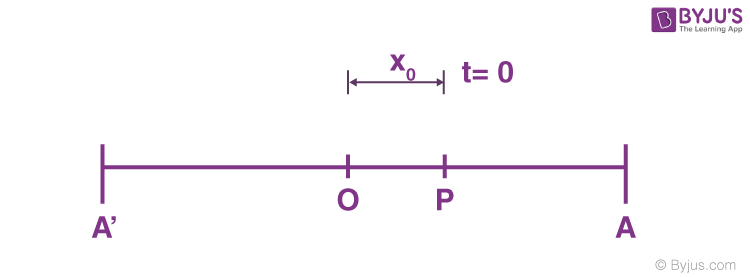
Consider a particle of mass (chiliad) executing Uncomplicated Harmonic Motion along a path ten o 10; the mean position at O. Allow the speed of the particle exist 50 when information technology is at position p (at a altitude no from O)
At t = 0 the particle at P (moving towards the right)
At t = t the particle is at Q (at a distance x from O)
With a velocity (v)
The restoring force
\(\brainstorm{array}{l}\overrightarrow{F}\end{array} \)
at Q is given by⇒
\(\begin{array}{l}\overrightarrow{F}=-K\overrightarrow{10}\cease{assortment} \)
K – is positive constant⇒
\(\begin{array}{fifty}\overrightarrow{F}=m\overrightarrow{a}\terminate{array} \)
\(\begin{assortment}{l}\overrightarrow{a}\end{array} \)
- acceleration at Q⇒
\(\begin{array}{fifty}yard\overrightarrow{a}=-K\overrightarrow{x}\terminate{array} \)
⇒
\(\begin{assortment}{l}\overrightarrow{a}=-\left( \frac{Thou}{thou} \right)\overrightarrow{x}\end{array} \)
Put,
\(\brainstorm{array}{l}\frac{K}{m}={{\omega }^{2}}\end{assortment} \)
⇒
\(\begin{array}{l}\omega =\sqrt{\frac{1000}{m}}\cease{array} \)
⇒
\(\begin{array}{50}\overrightarrow{a}=-\left( \frac{K}{m} \correct)\overrightarrow{g}=-{{\omega }^{ii}}\overrightarrow{ten}\terminate{assortment} \)
Since,\(\begin{assortment}{l}\left[ \overrightarrow{a}=\frac{{{d}^{2}}x}{d{{t}^{2}}} \right]\end{array} \)
\(\brainstorm{array}{l}\frac{{{d}^{ii}}\overrightarrow{x}}{d{{t}^{2}}}=-{{\omega }^{2}}\overrightarrow{ten}\end{assortment} \)
d210/dt2 + ωtwox = 0, which is the differential equation for linear simple harmonic move.
Solutions of Differential Equations of SHM
The differential equation for the Simple harmonic motion has the following solutions:
-
\(\begin{array}{l}x=A\sin \omega \,t\end{array} \)
(This solution when the particle is in its mean position point (O) in figure (a) -
\(\begin{array}{l}{{ten}_{0}}=A\sin \phi\finish{assortment} \)
(When the particle is at the position & (not at mean position) in figure (b) -
\(\begin{array}{l}x=A\sin \left( \omega t+\phi \right)\cease{assortment} \)
(When the particle at Q at in figure (b) (any time t).
These solutions can be verified past substituting this x values in the in a higher place differential equation for the linear simple harmonic motility.
Athwart Uncomplicated Harmonic Motion
A body free to rotate about an axis can brand athwart oscillations. For example, a photo frame or a calendar suspended from a blast on the wall. If it is slightly pushed from its mean position and released, it makes angular oscillations.
Conditions for an Angular Oscillation to be Angular SHM
The torso must experience a cyberspace Torque that is restoring in nature. If the angle of oscillation is small, this restoring torque volition exist directly proportional to the angular displacement.
Τ ∝ – θ
Τ = – kθ
Τ = Iα
α = – kθ
\(\begin{assortment}{50}I\frac{{{d}^{two}}\theta }{d{{t}^{two}}}=-Thou\theta\finish{array} \)
\(\begin{assortment}{l}\frac{{{d}^{ii}}\theta }{d{{t}^{2}}}=-\left( \frac{K}{I} \right)\theta =-\omega _{0}^{two}\theta\end{array} \)
\(\begin{array}{l}\frac{{{d}^{2}}\theta }{d{{t}^{2}}}=-\omega _{0}^{2}\theta =0\finish{assortment} \)
This is the differential equation of an angular Elementary Harmonic Motility. Solution of this equation is angular position of the particle with respect to time.
\(\begin{array}{fifty}\theta ={{\theta }_{0}}\sin \left( {{\omega }_{0}}t+\phi \right)\stop{array} \)
Then angular velocity,
\(\begin{array}{fifty}\omega ={{\theta }_{0}}.\,{{\omega }_{0}}\cos \left( {{\omega }_{0}}t+\phi \right)\end{array} \)
θ0 – aamplitude of the angular SHM
Example:
- Simple pendulum
- Seconds pendulum
- The physical pendulum
- Torsional pendulum
Quantitative Analysis of SHM
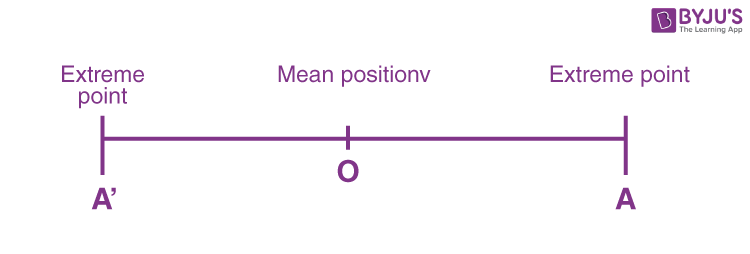
Let u.s. consider a particle executing Elementary Harmonic Motility between A and Aane about passing through the mean position (or) equilibrium position (O). Its analysis is every bit follows
SHM well-nigh Position O
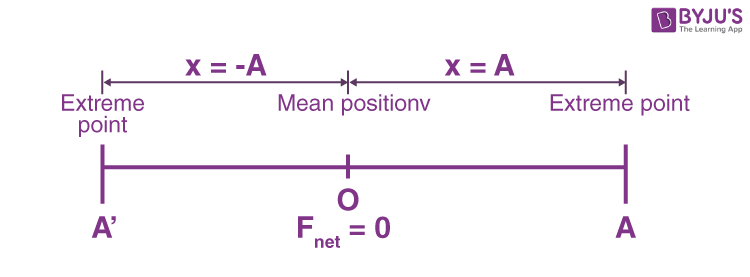
| Displacement | x = -A | x = 0 | x = +A |
| Acceleration | |a| = Max | a = 0 | |a| = max |
| Speed | |v| = 0 | |v| = Max | |5| = 0 |
| Kinetic energy | KE = 0 | KE = Max | KE = 0 |
| Potential energy | PE = Max | PE = Min | PE = Max |
Equation of Position of a Particle equally a Function of Time
Let u.s.a. consider a particle, which is executing SHM at fourth dimension t = 0, the particle is at a distance from the equilibrium position.
Necessary weather condition for Simple Harmonic Movement
-
\(\begin{assortment}{l}\overrightarrow{F}\propto -\overrightarrow{ten}\finish{array} \)
-
\(\brainstorm{array}{l}\overrightarrow{a}\propto -\overrightarrow{10}\end{array} \)
-
\(\begin{array}{l}\overrightarrow{a}=-{{\omega }^{2}}ten\end{array} \)
-
\(\begin{array}{l}\overrightarrow{a}=\frac{dv}{dx}\frac{dx}{dt}=5\frac{dv}{dx}\end{array} \)
-
\(\brainstorm{assortment}{l}\overrightarrow{a}=v\frac{dv}{dx}=-{{\omega }^{2}}x\end{array} \)
-
\(\begin{assortment}{l}\int\limits_{0}^{v}{vdv}=\int\limits_{0}^{x}{-{{\omega }^{2}}xdx}\terminate{array} \)
-
\(\brainstorm{array}{l}\frac{{{v}^{2}}}{2}=\frac{-{{\omega }^{2}}{{x}^{2}}}{2}+c\stop{array} \)
… (1)
Some status we know:
At point A v = 0 [ten = A] the equation (1) becomes
\(\begin{assortment}{l}\frac{{{5}^{2}}}{2}=\frac{-{{\omega }^{2}}{{A}^{2}}}{two}+c\finish{array} \)
v = 0O =
\(\begin{array}{l}\frac{-{{\omega }^{2}}{{A}^{2}}}{2}+c\cease{array} \)
c =
\(\begin{array}{50}\frac{{{\omega }^{2}}{{A}^{ii}}}{ii}\terminate{assortment} \)
Sub the value of C in equation (1)
\(\begin{array}{l}\frac{{{5}^{2}}}{2}=\frac{-{{\omega }^{2}}{{10}^{2}}}{2}+\frac{{{\omega }^{2}}{{A}^{2}}}{2}\finish{assortment} \)
⇒
\(\brainstorm{array}{l}{{v}^{2}}=-{{\omega }^{2}}{{x}^{2}}+{{\omega }^{2}}{{A}^{2}}\end{assortment} \)
⇒
\(\brainstorm{array}{l}{{v}^{2}}={{\omega }^{ii}}\left( {{A}^{two}}-{{x}^{ii}} \right)\terminate{array} \)
v =
\(\begin{array}{l}\sqrt{{{\omega }^{2}}\left( {{A}^{two}}-{{ten}^{ii}} \right)}\terminate{array} \)
five =
\(\begin{array}{l}\omega \sqrt{{{A}^{two}}-{{x}^{two}}}\finish{array} \)
… (ii)where, 5 is the velocity of the particle executing simple harmonic motion from definition instantaneous velocity
5 =
\(\begin{assortment}{l}\frac{dx}{dt}=\omega \sqrt{{{A}^{two}}-{{x}^{2}}}\finish{array} \)
⇒
\(\brainstorm{array}{l}\int{\frac{dx}{\sqrt{{{A}^{2}}-{{x}^{2}}}}}=\int\limits_{0}^{t}{\omega dt}\end{array} \)
⇒
\(\begin{array}{l}{{\sin }^{-one}}\left( \frac{x}{A} \right)=\omega t+\phi\cease{array} \)
x = Asin ( ωt + Φ) . . . . . (3)
The equation (3) – equation of position of a particle as a function of fourth dimension.
Case 1: If at t = 0
The particle at x = x0
⇒
\(\begin{assortment}{50}{{\sin }^{-1}}\left( \frac{x}{A} \right)=\omega t+\phi\end{assortment} \)
i.e.
\(\brainstorm{array}{l}{{\sin }^{-ane}}\left( \frac{{{x}_{0}}}{A} \right)=\phi\end{array} \)
initial phase of the particleΦ is the initial phase of the particle
Instance 2: If at t = 0
The particle at 10 = 0
\(\begin{assortment}{l}{{\sin }^{-1}}\left( \frac{O}{A} \right)=\phi\end{assortment} \)
i.e. Φ = 0
Case 3:If the particle is at i of its extreme position x = A at t = 0
⇒
\(\begin{array}{l}{{\sin }^{-ane}}\left( \frac{A}{A} \right)=\phi\end{array} \)
⇒
\(\begin{array}{50}{{\sin }^{-1}}\left( ane \right)=\phi\stop{array} \)
⇒ π/2 = Φ
Then, the value tin be anything depending upon the position of the particle at t = 0. That is why information technology is called initial phase of the particle.
Now if nosotros see the equation of position of the particle with respect to time
π/2 = x = A sin ( ωt + Φ)
sin (ωt + Φ) – is the periodic function, whose menstruum is T = 2π/ω
Which can be annihilation sine office or cosine function
Time Flow of SHM
The coefficient of t is ω.
And so the fourth dimension catamenia T = 2π/ω
ω =2π/T = 2πf
ωt = angular frequency of SHM.
From the expression of particle position every bit a office of time:
We can find particles, displacement
\(\begin{array}{l}\left( \overrightarrow{10} \correct), \stop{array} \)
velocity\(\brainstorm{array}{l}\left( \overrightarrow{five} \right)\cease{assortment} \)
and acceleration as follows.Velocity of a particle executing Simple Harmonic Motility
Velocity in SHM is given by v = dx/dt,
x = A sin (ωt + Φ)
5 =
\(\begin{assortment}{fifty}\frac{d}{dt}A\sin \left( \omega t+\phi \correct)=\omega A\cos \left( \omega t+\phi \right)\end{array} \)
v =
\(\begin{assortment}{l}A\omega \sqrt{1-{{\sin }^{two}}\omega t}\cease{array} \)
Since, x = A sin ωt
\(\brainstorm{array}{l}\frac{{{x}^{2}}}{{{A}^{2}}}={{\sin }^{two}}\omega \,t\end{array} \)
⇒
\(\begin{array}{fifty}v = A\omega \sqrt{i-\frac{{{x}^{ii}}}{{{A}^{ii}}}}\end{array} \)
⇒
\(\begin{array}{l}5 = \omega \sqrt{{{A}^{2}}-{{10}^{ii}}}\end{array} \)
On squaring both sides
⇒
\(\begin{array}{l}{{v}^{ii}}={{\omega }^{two}}\left( {{A}^{2}}-{{x}^{2}} \correct)\end{array} \)
⇒
\(\begin{array}{l}\frac{{{v}^{ii}}}{{{\omega }^{2}}}=\left( {{A}^{2}}-{{ten}^{2}} \right)\terminate{array} \)
⇒
\(\begin{array}{l}\frac{{{v}^{ii}}}{{{\omega }^{2}}{{A}^{ii}}}=\left( 1-\frac{{{x}^{2}}}{{{A}^{two}}} \right)\stop{array} \)
⇒
\(\begin{assortment}{l}\frac{{{v}^{2}}}{{{A}^{two}}}+\frac{{{v}^{two}}}{{{A}^{2}}{{\omega }^{ii}}}=1\cease{assortment} \)
this is an equation of an ellipse.The bend betwixt displacement and velocity of a particle executing the elementary harmonic move is an ellipse.
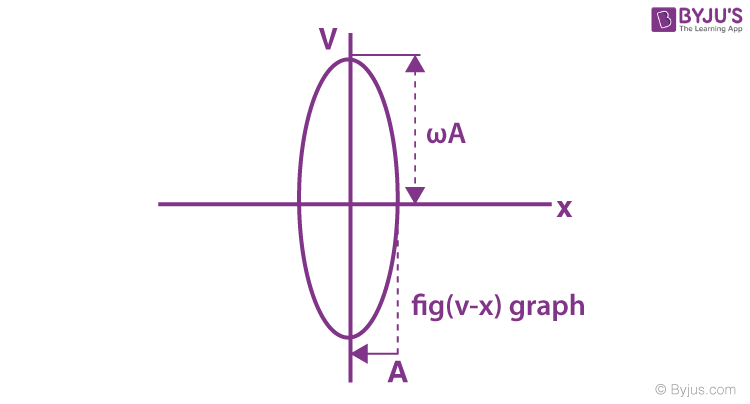
When ω = 1 then, the curve between v and x will exist circular.
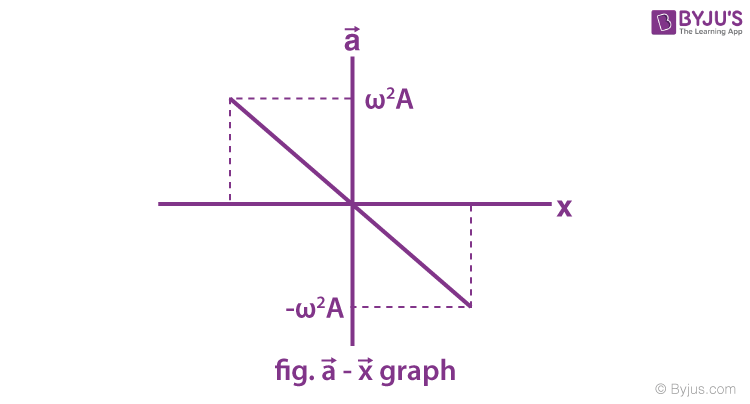
Acceleration in SHM
\(\brainstorm{array}{l}\overrightarrow{a}=\frac{dv}{dt}=\frac{d}{dt}\left( A\omega \cos \omega t+\phi \right)\end{array} \)
⇒
\(\begin{array}{l}\overrightarrow{a}=-{{\omega }^{2}}A\sin \left( \omega t+\phi \right)\end{array} \)
⇒
\(\begin{array}{50}\left| a \right|=-{{\omega }^{two}}x\end{assortment} \)
Hence the expression for displacement, velocity and acceleration in linear simple harmonic movement are
- x = A sin ( ωt + Φ)
- 5 =
\(\begin{array}{50}A\omega \cos \left( \omega t+\phi \right)=\omega \sqrt{{{A}^{2}}-{{ten}^{2}}}\end{array} \)
and - a =
\(\brainstorm{array}{50}-A{{\omega }^{2}}\sin \left( \omega t+\phi \right)=-{{\omega }^{2}}x\stop{array} \)
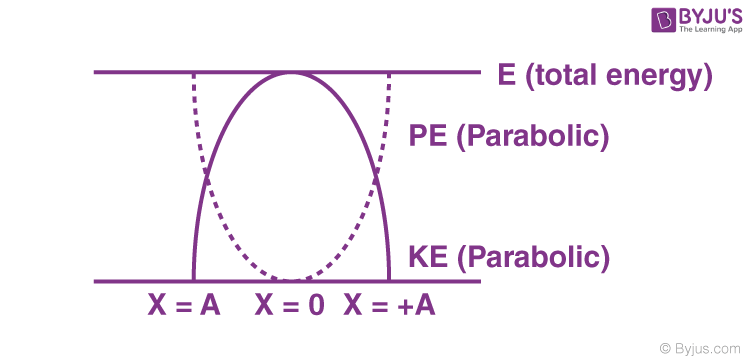
Energy in Unproblematic Harmonic Motion (SHM)
The organization that executes SHM is chosen the harmonic oscillator.
Consider a particle of mass m, executing linear simple harmonic motility of angular frequency (ω) and aamplitude (A) the displacement
\(\begin{assortment}{l}\left( \overrightarrow{x} \right),\end{array} \)
velocity\(\brainstorm{assortment}{l}\left( \overrightarrow{v} \right)\end{array} \)
and acceleration\(\brainstorm{array}{fifty}\left( \overrightarrow{a} \right)\end{array} \)
at whatsoever time t are given byx = A sin (ωt + Φ)
v =
\(\begin{array}{50}A\omega \cos \left( \omega t+\phi \right)=\omega \sqrt{{{A}^{2}}-{{ten}^{2}}}\end{array} \)
a =
\(\brainstorm{array}{fifty}-{{\omega }^{two}}A\sin \left( \omega t+\phi \right)=-{{\omega }^{ii}}x\end{array} \)
The restoring forcefulness
\(\begin{array}{50}\left( \overrightarrow{F} \right)\end{array} \)
acting on the particle is given byF = -kx where thousand = mωtwo.
Kinetic Energy of a Particle in SHM
Kinetic Energy =
\(\brainstorm{array}{50}\frac{1}{2}thou{{v}^{2}}\cease{array} \)
\(\begin{assortment}{l}\left[ Since, \;{{5}^{2}}={{A}^{2}}{{\omega }^{ii}}{{\cos }^{two}}\left( \omega t+\phi \correct) \correct]\end{array} \)
=
\(\brainstorm{array}{l}\frac{ane}{ii}m{{\omega }^{2}}{{A}^{2}}{{\cos }^{two}}\left( \omega t+\phi \right)\end{array} \)
=
\(\begin{array}{l}\frac{1}{ii}m{{\omega }^{ii}}\left( {{A}^{2}}-{{ten}^{2}} \right)\cease{array} \)
Therefore, the Kinetic Energy =
\(\begin{array}{l}\frac{1}{two}m{{\omega }^{2}}{{A}^{2}}{{\cos }^{2}}\left( \omega t+\phi \right)=\frac{1}{2}m{{\omega }^{2}}\left( {{A}^{2}}-{{x}^{2}} \right)\end{assortment} \)
Potential Free energy of SHM
The total work done by the restoring force in displacing the particle from (ten = 0) (mean position) to x = x:
When the particle has been displaced from x to x + dx the work done past restoring strength is
dw = F dx = -kx dx
w =
\(\begin{assortment}{50}\int{dw}=\int\limits_{0}^{10}{-kxdx=\frac{-g{{x}^{2}}}{ii}}\end{array} \)
=
\(\begin{array}{l}-\frac{m{{\omega }^{2}}{{x}^{2}}}{2}\end{array} \)
\(\begin{array}{fifty}\left[ \,k=m{{\omega }^{2}} \correct]\end{array} \)
=
\(\brainstorm{array}{fifty}-\frac{m{{\omega }^{two}}}{ii}{{A}^{two}}{{\sin }^{ii}}\left( \omega t+\phi \right)\end{array} \)
Potential Energy = -(piece of work done by restoring force)
Potential Energy =
\(\brainstorm{assortment}{l}\frac{one thousand{{\omega }^{2}}{{ten}^{ii}}}{2}=\frac{m{{\omega }^{ii}}{{A}^{two}}}{2}{{\sin }^{two}}\left( \omega t+\phi \right)\end{assortment} \)
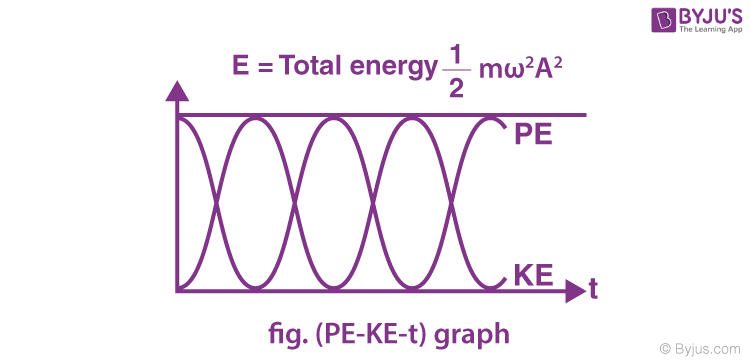
Total Mechanical Free energy of the Particle Executing SHM
Due east = KE + PE
E =
\(\begin{array}{l}\frac{i}{two}one thousand{{\omega }^{2}}\left( {{A}^{2}}-{{x}^{2}} \right)+\frac{i}{2}m{{\omega }^{ii}}{{x}^{2}}\stop{array} \)
E =
\(\brainstorm{assortment}{50}\frac{1}{2}m{{\omega }^{2}}{{A}^{2}}\terminate{array} \)
Hence the full energy of the particle in SHM is abiding and it is contained of the instantaneous displacement.
⇒ Human relationship betwixt Kinetic Free energy, Potential Free energy and time in Unproblematic Harmonic Movement at t = 0, when ten = ±A.
⇒ Variation of Kinetic Energy and Potential Free energy in Simple Harmonic Motion with displacement:
Geometrical Interpretation of Simple Harmonic Movement
If a particle is moving with compatible speed along the circumference of a circle then the directly line motion of the pes of the perpendicular drawn from the particle on the diameter of the circle is called uncomplicated harmonic motion.
SHM equally a Project of Round Move
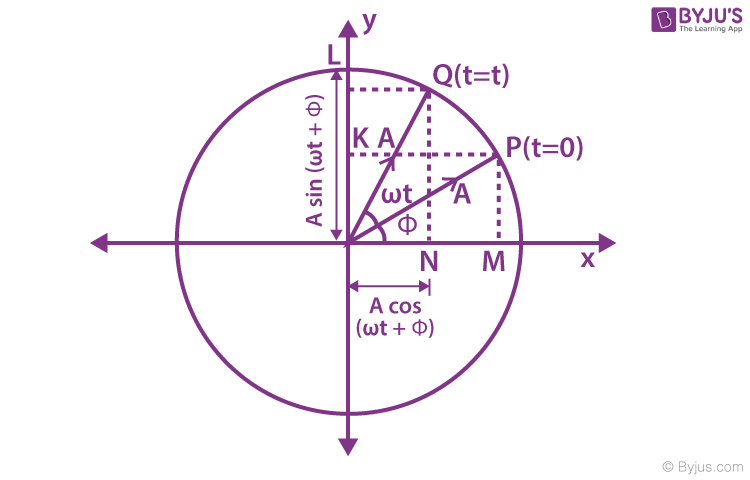
The particle is at position P at t = 0 and revolves with a constant angular velocity (ω) along a circle. The project of P on the diameter along the x-axis (Chiliad). At the afterwards time (t) the particle is at Q. Now its project on the diameter along the x-axis is N.
As the particle P revolves around in a circle anti-clockwise its projection One thousand follows it up moving back and forth along the bore such that the deportation of the point of projection at any time (t) is the x-component of the radius vector (A).
x = A cos ( ωt + Φ) . . . . . . . (1)
y = A sin ( ωt + Φ) . . . . . (2)
Thus, nosotros meet that the uniform circular movement is the combination of two mutually perpendicular linear harmonic oscillation.
It implies that P is nether compatible circular motility, (1000 and Due north) and (Grand and L) are performing simple harmonic motion most O with the same angular speed ω every bit that of P.
P is under uniform circular motility, which volition have centripetal acceleration along A (radius vector)
\(\begin{array}{l}\overrightarrow{{{a}_{c}}}=A{{\omega }^{2}}\stop{array} \)
(towards the centre)Information technology can exist resolved into 2 components:
-
\(\begin{assortment}{50}{{a}_{N}}=A{{\omega }^{2}}{{\sin }^{two}}\left( \omega t+\phi \correct)\end{assortment} \)
-
\(\begin{assortment}{l}{{a}_{L}}=A{{\omega }^{ii}}{{\cos }^{2}}\left( \omega t+\phi \right)\end{assortment} \)
aDue north and aL acceleration respective to the points N and L respectively.
In the above word, the foot of projection on the ten-axis is chosen horizontal phasor.
Similarly, the foot of the perpendicular on the y-axis is called vertical phasor. Already we know the vertical and horizontal phasor will execute the simple harmonic motion of aamplitude A and angular frequency ω. The phases of the two SHM differ past π/2.
Trouble-Solving Strategy in Horizontal Phasor
- Let united states of america presume a circumvolve of radius equal to the amplitude of SHM.
- Assume a particle rotating in a circular path moving with abiding same as that of unproblematic harmonic motility in the clockwise direction.
- Angle made past the particle at t = 0 with the upper vertical axis is equal to φ (phase constant).
- The horizontal component of the velocity of a particle gives you lot the velocity of a particle performing the uncomplicated harmonic motion.
- The component of the acceleration of a particle in the horizontal management is equal to the acceleration of the particle performing SHM. [In compatible circular acceleration centripetal only ac = ωiiA].
Waves and Elementary Harmonic Motility Important Questions

Source: https://byjus.com/jee/simple-harmonic-motion-shm/
0 Response to "Review (Figure 1) Is the Position-versus-time Graph of a Particle in Simple Harmonic Motion"
Postar um comentário